let's change the way we grow plants
robotics and ai for horticultural automation
robotics and ai for horticultural automation
Scene segmentation from point clouds and motion planning with MoveIt! play an important part in automating the tasks that gardening experts perform on a daily basis.
Tired: Grow AreasWired: Grow Volumes
Decouple weather conditions and food security. Grow whatever plants you want, anywhere on (or off) the globe, pesticide-free.
SynPon has been built from the ground up on Open Source Software and Hardware. We are working in close association with Open Source Robotics Lab to develop open source horticultural automation.
We are not in Series A, B, C, or whatever. We are not in "Stealth Mode". We are a privately owned small business and are perfectly content to remain as such. We only need a small amount of seed funding, on the same scale as purchasing a home.
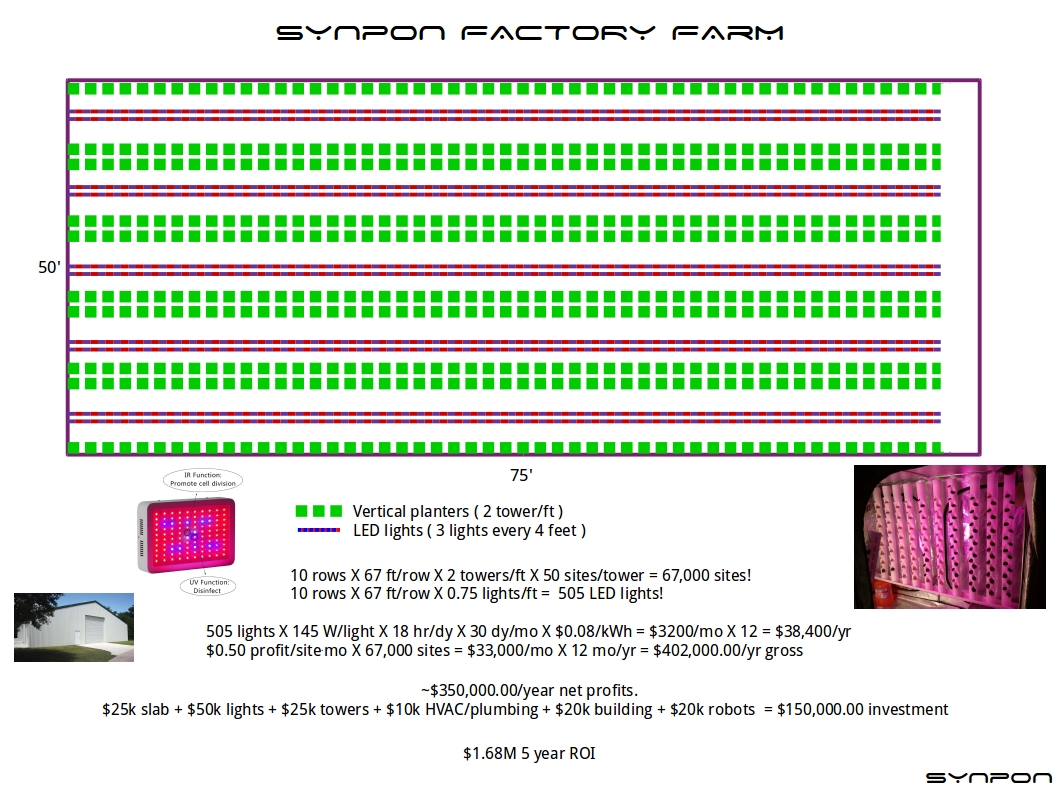
Due to the space efficiency of our vertical planting methods we are capable of the same output as a much larger horizontal growing facility. Automating the labor of planting, tending, and harvesting the plants allows our operation to scale up our labor in direct relation to our profits. More money means more robots, more robots mean more plants, more plants mean more money... and so forth.
Business that employ a large degree of automation grow by different rules than other enterprises. SynPon has been built from the ground up to exploit these differences in operations from a normal business to maximal effect.


We're not like those other greenhouses. We use lots of fancy technology. The fanciest technology. GIVE US MONEY. Don't wait. Contact us today!






























